Method
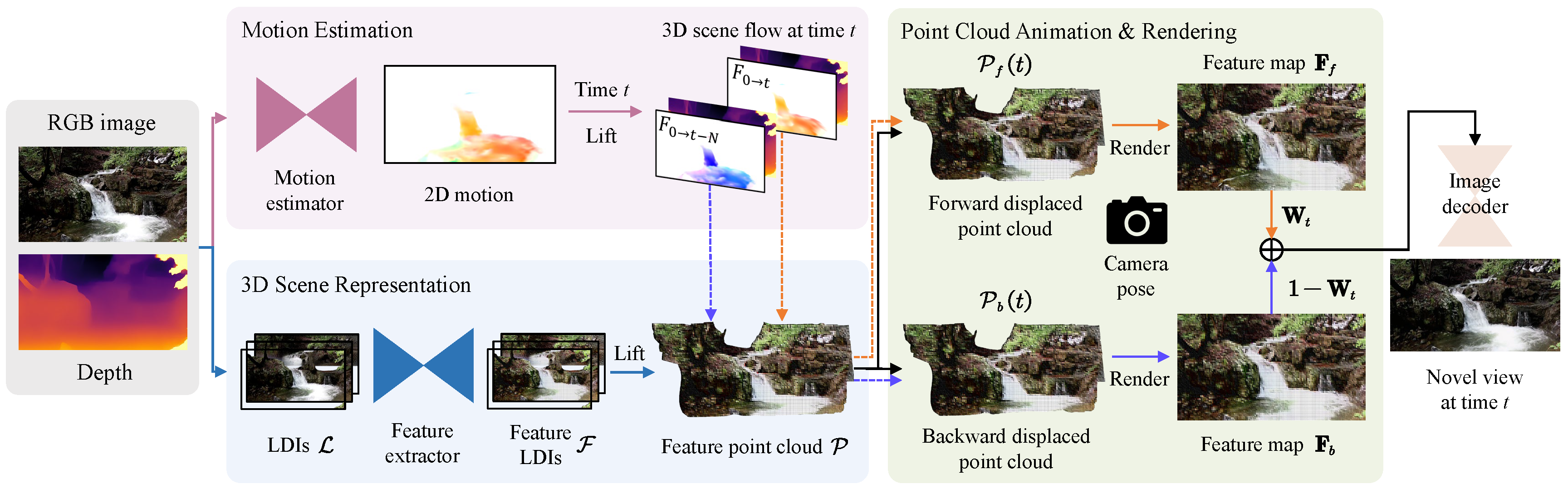
Given a single still image as input, we first predict a dense depth map. To represent the scene in 3D space, we separate the input image into several layers according to depth discontinuities and apply context-aware inpainting, yielding layered depth images (LDIs). We then use a 2D feature extractor to encode 2D feature maps for each inpainted LDI color layer, resulting in feature LDIs. Subsequently, we lift feature LDIs into 3D space using corresponding depth values to obtain a feature point cloud. To animate the scene, we estimate a 2D motion field from the input image and apply Euler integration to generate forward and backward displacement fields. We then augment displacement fields with estimated depth values to obtain 3D scene flow fields. Next, we bidirectionally displace the feature point cloud as per the scene flow and separately project them into target image planes to obtain feature maps. Finally, we blend them together and pass the result through our image decoder to synthesize a novel view at time t.